Tieliikenteen automaatiotasot ja toimintaympäristön vaatimukset
Tilannekuvassa tarkastellaan tieliikenteen automaatiotasoja ja toimintaympäristön vaatimuksia. Tietoja päivitetään kerran vuodessa. Tiedon tuottamisesta vastaa Liikenne- ja viestintävirasto Traficom.
Tällä sivulla
- Yhteenveto
- SAE:n automaatiotasojen luokitusjärjestelmä
- Ajoneuvojen suunniteltu toimintaympäristö ja Suomen tieverkon valmius automaattiajoneuvoille
- Väylien alustavaa palvelutasoluokittelua automaattiliikenteelle
Yhteenveto
- SAE:n tieliikenteen automaatiotasoluokitus jakaa automaation kuuteen tasoon, joissa automaation osuus kasvaa ja kuljettajan vastuu vähenee tason noustessa. Luokitusjärjestelmä on kuitenkin käyttäjän ja vastuukysymysten kannalta vain suuntaa antava.
- Automattisen ajamisjärjestelmän suunniteltu toimintaympäristö (ODD) määrittää olosuhteet, joiden täyttyessä ajoneuvo voi toimia automaattitilassa. Toimintaympäristö muodostuu muun muassa tien ominaisuuksista, sääolosuhteista ja tarvittavista tietoliikenneyhteyksistä. Jos olosuhteet eivät täyty, kuljettajan on ajettava ajoneuvoa itse tai ajoneuvon etähallinalla ratkaistaan tilanne.
- Suomessa Väylävirasto selvitti moottoritieverkon soveltuvuutta automaattiajoon. Hankkeessa tarkasteltiin mm. fyysistä ja digitaalista infrastruktuuria, viestintäverkkoja ja paikannuspalveluita, ja ne todettiin pääosin sopiviksi automaattiajamisen vaatimuksiin. Hankkeessa kehitettiin myös väylien alustavaa palvelutasoluokittelua automaattiajoneuvoille.
SAE:n automaatiotasojen luokitusjärjestelmä
Eniten käytetty tieliikenteen automaatiotasoluokitus (SAE) sisältää kuusi luokkaa. Luokituksessa automaation osuus ajotehtävien eri osien suorittamisesta kasvaa, mitä ylemmälle tasolle noustaan, ja kuljettajan vastuu ajotehtävästä vastaavasti vähenee (kts. alla oleva kuva).
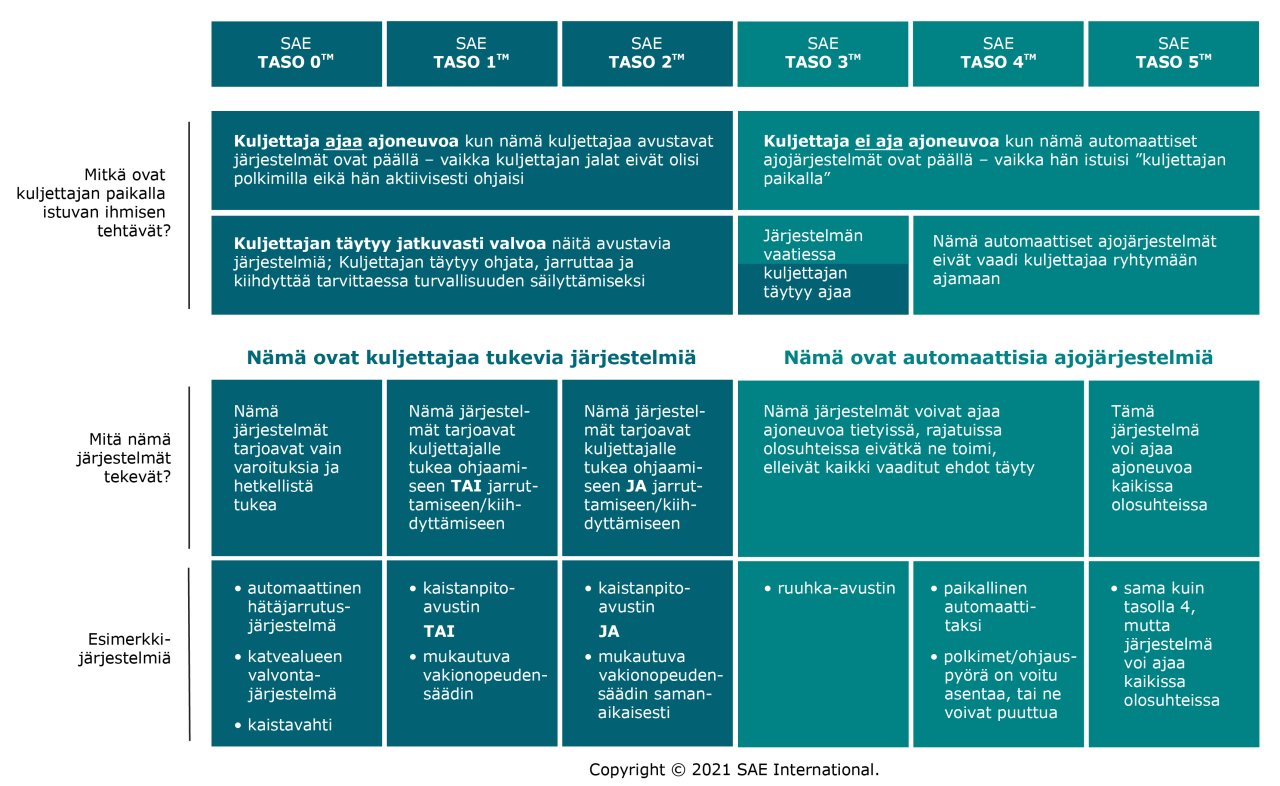
Kuva: Tieliikenteen automaatiotasot SAE-luokituksen mukaisesti.
Kuljettajan kannalta suurin ero on automaatiotasojen 2 ja 3 välillä, jossa siirrytään kuljettajaa avustavasta tukijärjestelmästä automaattiseen ajojärjestelmään. Automaatiotasoilla 1 ja 2 kuljettajan on koko ajan valvottava, että ajoneuvo toimii turvallisesti ja huolehdittava ajamisesta niiltä osin, kun tukijärjestelmä ei turvallisesti pysty siihen. Automaatiotasosta 3 alkaen automaattinen ajojärjestelmä huolehtii itsenäisesti kaikista ajotehtävään liittyvistä toimista toiminta-alueensa ja -olosuhteidensa rajoissa, eikä kuljettajan ajoneuvoteknisistä syistä tarvitse valvoa järjestelmän toimintaa. Esimerkki tason 3 järjestelmästä on automaattinen kaistalla pysymisen järjestelmä. Käytännössä on kuitenkin huomattu, että aina ei ole aivan selvää, milloin siirrytään kuljettajaa avustavasta tukijärjestelmästä automaattiseen ajojärjestelmään. Automaatiotasot 3 ja 4 erottuvat toisistaan siinä, kuinka valmiina automaattisen ajojärjestelmän käyttäjän tulee olla ottamaan ajoneuvo hallintaan, kun automaattinen ajojärjestelmä tulee toiminta-alueensa ulkopuolelle. Automaatiotasolla 3 kuljettajan täytyy koko ajan olla valmis ottamaan ajoneuvo hallintaansa automaattisen ajojärjestelmän sitä pyytäessä. Automaatiotasolla 4 kuljettaja on matkustajan roolissa. Hänen ei välttämättä tarvitse välttämättä tehdä mitään automaattisen ajojärjestelmän toiminta-alueen loppuessa, vaan järjestelmä osaa itse lopettaa toimintansa turvallisesti.
Käyttäjän ja vastuukysymysten kannalta SAE:n automaatiotasojen luokitusjärjestelmä on vain suuntaa antava. Ajoneuvon automaatiojärjestelmät kehittyvät koko ajan, ja samassa ajoneuvossa voi olla erilaisia ja eri automaatiotasoilla toimivia järjestelmiä tai ominaisuuksia riippuen siitä, missä toimintaympäristössä niiden on suunniteltu toimivan. Automaation luokittelussa sääntelyn ja käyttäjän näkökulmasta pyritäänkin löytämään yksinkertaisempi ratkaisu.
Ajoneuvojen suunniteltu toimintaympäristö ja Suomen tieverkon valmius automaattiajoneuvoille
Automaattinen ajoneuvo tarvitsee jatkuvasti suuren määrän tietoa ympäristöstä ja muusta liikenteestä, jotta se pystyy toimimaan automaattitilassa. Tarvittavien tietojen kuvaamiseksi on kehitetty termi automaattisen ajamisjärjestelmän suunniteltu toimintaympäristö (Operational Design Domain, ODD). Se määrittää olosuhteet, joiden täyttyessä ajoneuvo voi toimia automaattitilassa. Jos ne eivät täyty, kuljettajan on ajettava ajoneuvoa. Toimintaympäristöt muodostuvat esimerkiksi tien ominaisuuksista ja varusteista, mahdollisista liikennetilanteista, kelistä, näkyvyydestä ja säästä sekä tarvittavista tietoliikenneyhteyksistä ja niiden kautta saatavista tiedoista. Näitä koskevat tiedot voivat olla luonteeltaan pysyviä tai muuttuvia. Ajoneuvojen valmistajat määrittävät, millaisessa toimintaympäristössä ko. ajoneuvo on toimintakykyinen. Toimintaympäristöt voivat olla erilaisia riippuen siitä, mistä automaattisesta ajojärjestelmästä on kyse. Eri ajoneuvoille suunniteltuja toimintaympäristöjä ja ajoneuvojen tietotarpeita analysoimalla voidaan arvioida, miten valmiita tiet ovat automaattiajoneuvojen tulemiselle.
Suomessa selvitettiin Väyläviraston johdolla nykyisen moottoritieverkon soveltuvuutta automaattiajoon (automaatiotasot 3 ja 4) henkilöautojen ja rekkaletkojen näkökulmista. Hankkeessa Ulkoinen verkkopalvelu. tutkittiin mm. fyysistä ja digitaalista tieinfrastruktuuria, viestintäverkkoja ja paikannuspalveluita. Niiden havaittiin olevan suurelta osin kunnossa automaattiajamisen vaatiman tuen kannalta.
Hankkeessa kehitettiin myös väylien alustavaa palvelutasoluokittelua, josta selviää, millaisia palveluita tietyn luokituksen moottoritieosuus tarjoaa automaattiajamiseen. Luokittelu kuvaa tieverkon tarjoamia ominaisuuksia suhteessa automaattisten ajamisjärjestelmien suunniteltuihin toimintaympäristöihin ja sisältää tietolajeja, jotka ovat merkityksellisiä automaattiajamiselle. Palvelutasoluokkia on viisi, ja edeltävä palvelutasoluokka on lähtökohtana seuraavalle luokalle:
Väylien alustavaa palvelutasoluokittelua automaattiliikenteelle
Muokattu alkuperäisestä lähteestä: FTIA publications 21/2021. Study of Infrastructure Support and Classification for Automated Driving on Finnish Motorways Ulkoinen verkkopalvelu..
Tulevaisuudessa myös mm. liikennesäännöt ja erilaiset tien käyttöä koskevat rajoitukset on todennäköisesti tarjottava koneluettavassa muodossa automaattiajoneuvojen tarpeisiin. (TM4CAD 2023 Ulkoinen verkkopalvelu.).